In September 2021, Rachel Saker sent me a picture of a "little known descender" that she found on Instagram. Although the Instagrammer was Mexican, this descender had a Russian look to it. I wrote to the Instagrammer to learn more. He replied and confirmed that this was a Russian device, acquired years ago in St. Petersburg. He wasn't sure who made it.
In September 2021, Rachel Saker sent me a picture of a "little known descender" that she found on Instagram. Although the Instagrammer was Mexican, this descender had a Russian look to it. I wrote to the Instagrammer to learn more. He replied and confirmed that this was a Russian device, acquired years ago in St. Petersburg. He wasn't sure who made it.
Meanwhile, Artyom Babin (Артём Бабин) was also able to confirm that it was Russian, and identified the descender as the СУ-Р2, developed by Boris Kashevnik (Борис Кашевник) and produced by Boris’ company Spassnaryazhenie (Спасснабжение). Артём sent me some Russian references to the R2. These contained photos and scalable drawings of another version of this descender, showing the portions hidden by the front cover in the original Instagram photo.
Once I had plans, I did what any perfectly normal vertical gear freak would do: I built one. My version has some non-functional changes to simplify fabrication in my home shop (living without a CNC plasma cutter is hard).
Technical Details
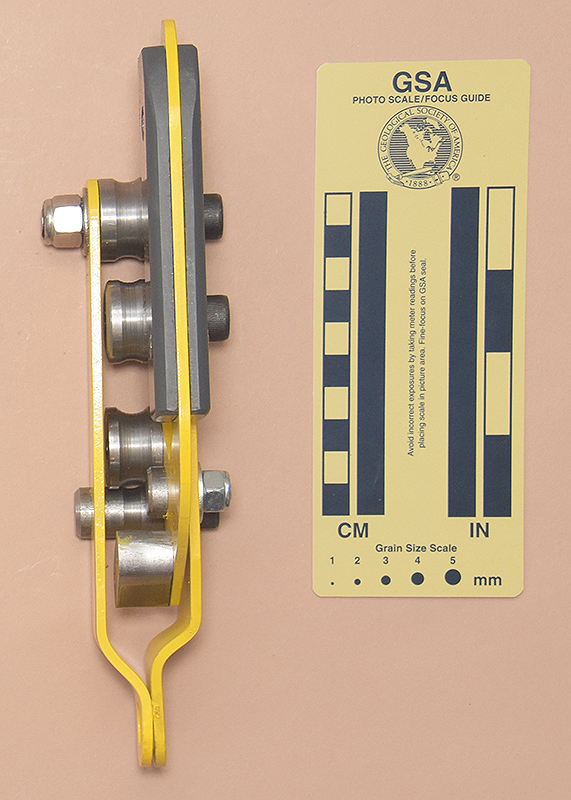
I made this Storrick – Kashevnik R2 (СУ-Р2) in 2022, using published photographs and sketches as a guide.
My Storrick – Kashevnik R2 (СУ-Р2) is 207 mm. tall, 31 mm. wide, 55 mm. thick, and weighs 866 g.
The R2 consists of a back plate and a swinging front plate with three fixed bollards and a hand lever mounted between them. The lever mounts a fourth bollard and a stop block. I made the plates and the lever from 1/8" (3.2 mm.) 4140 steel. The bollards and stop blocks ar 1018 steel, and the hand grip is PVC. The three bollards mounted to the rear plate are fastened with 3/8-16 UNC socket cap screws. The remaining fasteners are stainless steel.
The front plate is a simple strap, while the rear plate has an irregular shape. Both plates have dog-legs near the bottom so that they touch. 9/16" (14.4 mm.) holes at the bottom of these plates provide a carabiner attachment point.
The top bollards and the bollard on the handle are 25.2 mm. in diameter and have shallow rope grooves. The top bollard is 22.4 mm. long and sets the spacing between the front and rear plates. The second bollard is 21.7 mm. long to provide clearance to the front strap, and the fourth bollard is 16.4 mm. long. The third bollard is 15.7 mm. in diameter, 31.5 mm. long, and has a rope groove and a square-bottom notch to engage a notch in the front plate. All four bollards are pinned with spring pins to prevent rotation.
The hand lever is irregular. It pivots on a shoulder bolt. The attached bollard was described in the preceding paragraph. The stop block is 32 mm. long, 15.7 mm. wide, and 17.2 mm. tall. The mounting screws are off-center to provide a means to adapt the R2 to larger or smaller ropes.
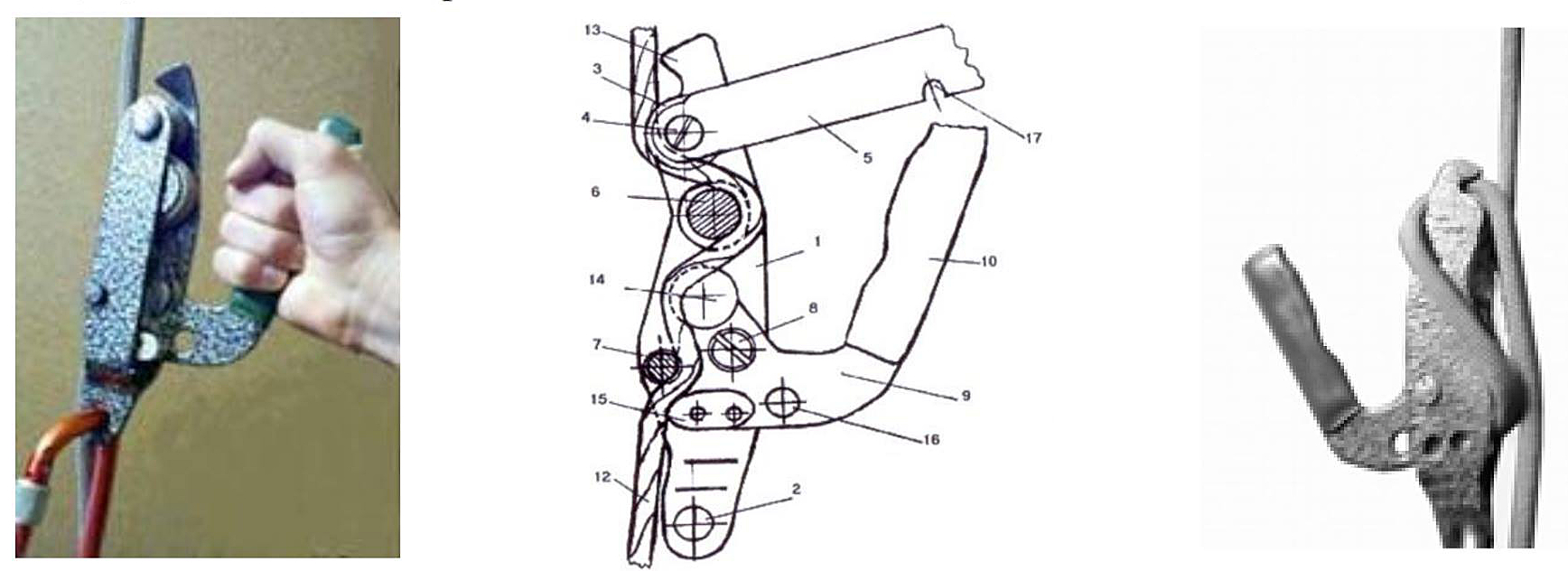
I translated and paraphrased these instructions from pages Артём sent me. These were taken from an unspecified Russian document:
The rope runs in a zigzag manner around rollers 3, 6, 14, 7 and cam 15, and the wrap angles are adjusted by turning the handle about axis 8.
The device can be adjusted to the diameter of the rope due to the different cam positions. The threading of the rope can be seen from the figure.
You can start the descent by pushing the handle upwards, "away from you" (counterclockwise). When the handle is pulled down,completely released, or if control is lost, the device brakes.
The descender provides automatic locking in the event of loss of control of the rope during descent.
For a complete stop, if you need to hang for a long time, it is necessary to lay the lower branch of the rope behind the ledge 13, in the fixing position, as shown in the figure.
So how well does it work? Winter weather came before I had time to do more than superficial testing, but some things are obvious. First, it is difficult to rig the device on stiff 11 mm. Pit Rope, and descending on that rope would be next to impossible. The R2 should be used on flexible ropes, and mine appears to be better suited to 9 mm. than 11 mm.
Descending requires moving the handle upward. I find this quite unnatural, probably because most handled descenders work in the opposite direction. The advantage is, of course, that panicking and pulling the handle downwards will stop the descent; however, I fail to understand why panicking is desirable in the first place. Panic is not natural and people susceptible to panic should not be doing rope work in the first place.
Having made my R2 from steel created a descender that is too heavy for practical caving use. An aluminum version would weigh a more reasonable ~300 g.